

이제 막 DCS에 입문하신 분들이나 오랜만에 복귀하신 분들을 위해
AV-8B Night Attack V/STOL 모듈의 Cold and Dark Startup 과정을 튜토리얼 형식으로 만들어보았습니다.
튜토리얼을 시작하기에 앞서
본 튜토리얼은 실제 항공기 운용 매뉴얼에 입각해 작성했다기보다는
가급적 쉽고 편하게 항공기에 익숙해지는 것을 목적으로 한 만큼 실제 절차와는 다소 다를 수 있습니다.
아울러 본 튜토리얼은 DCS World 2.5.5.41371 버전을 기반으로 합니다.
(2.7.0.5118 버전에 맞춰 일부 내용을 수정했습니다)
그럼 시작하겠습니다.
(PC에서 이미지를 클릭하시면 좀 더 큰 이미지를 볼 수 있습니다)

#.2
시작에 앞서 Options -> Special -> AV-8B N/A로 이동해
INS default alignment를 UNALIGNED로 변경해줍니다.

#.3
배터리 스위치 : ON (위로 올려줍니다)

#.4
노브를 시계방향으로 돌려 실내 등화를 켜줍니다.
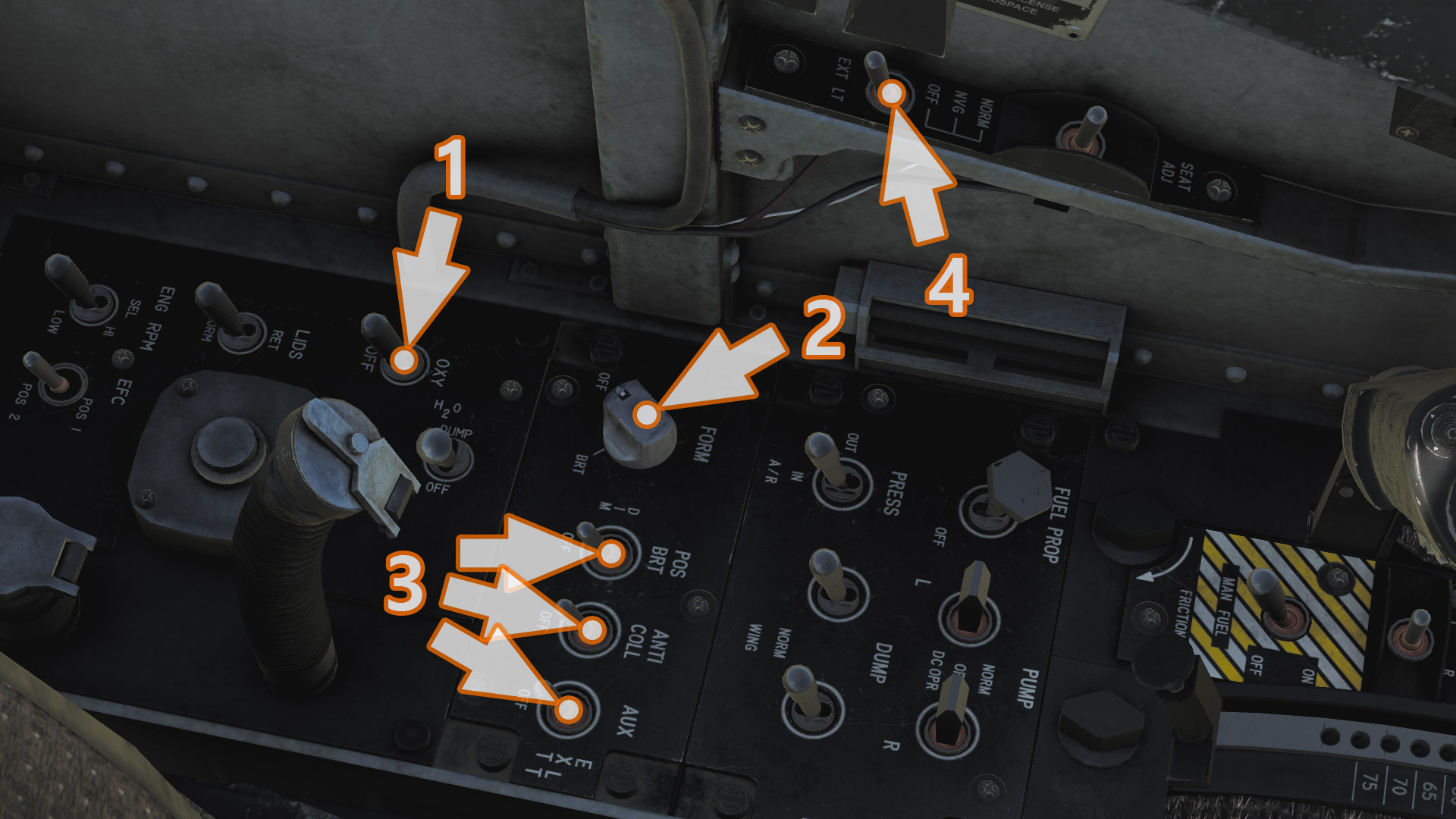
#.5
산소 공급장치 스위치를 (OXY) 위로 올려줍니다. (1)
노브를 시계방향으로 돌려 편대등을 켜줍니다. (2)
스위치를 위로 올려 항법등 (POS BRT), 충돌방지등 (ANTI COLL), Auxiliary Landing Light를 켜줍니다. (3)
스위치를 NORM 위치로 올려 External Lights Master를 켜줍니다. (4)

#.6
Fuel Shut Off 레버 (1) : ON (아래로 내려줍니다)
DECS (Digital Engine Control System / 2) : ON (위로 올려줍니다)

#.7
오른쪽 및 왼쪽 연료 펌프 (1) : NORM (위로 올려줍니다)

#.8
엔진 시동 스위치를 ENG ST 위치로 올려줍니다.

#.9
엔진 RPM이 9.2%가 되면...

#.10
스로틀을 살짝 밀어 IDLE 위치로 옮겨줍니다.
(조이스틱 등에 있는 스로틀 레버를 조금 올렸다가 다시 내리면 됩니다)

#.11
엔진 RPM이 약 28.5%가 되면 엔진 시동이 완료된 것입니다.

#.12
아래 명시한 장비의 노브를 시계방향으로 돌려 전원 또는 조명을 켜줍니다.
왼쪽 MPCD (1), 오른쪽 MPCD (2), UFC (3), COMM1 라디오 (4), COMM2 라디오 (5), HUD (6), 엔진 인디케이터 (7)

#.13
엔진 시동이 완료되었고 세부 설정에 앞서 INS 정렬을 시작합니다.
AV-8B의 경우 INS 정렬에 앞서 항공기의 현재 위치를 입력해야 합니다.
※ INS 정렬에 앞서 반드시 파킹브레이크가 걸려있어야 합니다.
왼쪽 MPCD (Multipurpose Color Displays)가 켜지면 EHSD 선택
#.14
DATA 선택

#.15
A/C 선택

#.16
A/C를 선택하면 왼쪽 MPCD 상단의 ODU와 UFC의 디스플레이에 글씨 및 숫자가 표시됩니다.
이 상태에서 UFC의 키패드를 이용해 항공기의 현재 좌표 중 위도부터 입력하는데...

#.17
항공기의 현재 좌표는 니보드 (단축키 RShift + K)를 통해 확인할 수 있습니다.
INS 정렬에 필요한 데이터는 Initial Position 항목의 Latitude(위도), Longitude(경도), Mag Var(자기편차)입니다.
덧붙여 AV-8B는 UFC에 입력할 때 00˚ 00' 00" 포맷을 가진 DMS (Degree Minutes Seconds) 좌표계를 사용하며,
좌표 입력 후 ENT를 누르면 00˚ 00.000' 포맷을 가진 DDM (Degrees Decimal Minutes) 좌표계로 자동 변환되어 입력됩니다.
위도 : N42˚ 10' 54"
경도 : E042˚ 27' 51"
자기편차 : E6.2˚

#.18
MPCD에서 A/C를 선택하면 별도의 설정을 하지 않더라도 ODU에 POS가 선택되어있고 UFC에 위도를 입력할 수 있게 되어있으므로
곧바로 위도부터 입력합니다.
(위도 입력 창은 * 00˚00'00으로 표시됨)
위도를 입력하기에 앞서 북위인지 남위인지를 먼저 지정해야 합니다.
북위면 숫자 키패드 2 (N이라 적혀있음), 남위면 숫자 키패드 8 (S라 적혀있음)을 누릅니다.
디스플레이에 위도가 지정되었는지를 확인한 후...

#.19
1 : UFC의 키패드를 이용해 위도를 다음과 같이 입력합니다.
421054
2 : 입력이 끝났으면 ENT를 누릅니다.

#.20
이제 경도를 입력하기 위해 ODU의 POS를 한번 눌러 UFC 디스플레이를 경도 입력화면으로 전환합니다.
(경도 입력 창은 * 000˚00'00으로 표시됨 / 위도보다 도 부분에 0이 하나 더 많음)

#.21
위도와 마찬가지로 경도도 경도를 입력하기에 앞서 동경인지 서경인지를 먼저 지정해야 합니다.
동경이면 숫자 키패드 6 (E라 적혀있음), 서경이면 숫자 키패드 4 (W라 적혀있음)을 누릅니다.
디스플레이에 경도가 지정되었는지를 확인한 후...

#.22
1 : UFC의 키패드를 이용해 위도를 다음과 같이 입력합니다.
0422751
주의할 점이 있다면 0~90도까지 존재하는 위도와 달리 경도는 1~180도까지 존재하기 때문에
경도를 입력할 때 도(Degree) 단위는 반드시 세자리로 입력해야 합니다.
2 : 입력이 끝났으면 ENT를 누릅니다.

#.23
이어서 ODU의 MVAR을 한번 눌러 UFC 디스플레이를 자기편차 입력화면으로 전환합니다.

#.24
자기편차를 입력하기에 앞서 동쪽으로 꺾여있는지 서쪽으로 꺾여있는지를 먼저 지정해야 합니다.
동쪽이면 숫자 키패드 6 (E라 적혀있음), 서쪽이면 숫자 키패드 4 (W라 적혀있음)을 누릅니다.
디스플레이에 방향이 지정되었는지를 확인한 후...

#.25
1 : UFC의 키패드를 이용해 위도를 다음과 같이 입력합니다.
6.2
2 : 입력이 끝났으면 ENT를 누릅니다.

#.26
항공기의 Initial Position 입력이 끝났으니 INS 노브를 INS GND로 돌려 INS 정렬을 시작합니다.
만약 항공기가 항공모함이나 강습함 등 선박에 주기되어있는 경우 SEA로 돌립니다.

#.27
왼쪽 MPCD에 INS 정렬과 관련된 데이터가 뜨고 본격적으로 INS 정렬을 시작합니다.
콤파스 안쪽의 위도/경도 좌표는 앞서 입력한 위도/경도를 DDM 좌표계로 변환해 표시한 것입니다.

#.28
INS 정렬이 진행되는 동안 다른 출발 절차를 수행합니다.
HUD Mode Control : VSTOL 클릭

#.29
Flap 마스터 스위치 (1) : ON (가운데)
Anti Skid (2) : NWS (아래)
Flap 마스터 스위치 위쪽의 Flap 포지션 스위치는 상황에 맞춰 Auto 혹은 STOL로 설정합니다.
(STOL : 단거리 이착륙)

#.30
1 : Yaw, Roll, Pitch 자세 안정장치 스위치가 ON 되어있는지 (위로 올라가있는지) 확인합니다.
2 : JPTL (Jet Pipe Temperature Limiter) 스위치가 ON 되어있는지 (아래로 내려가있는지) 확인합니다.

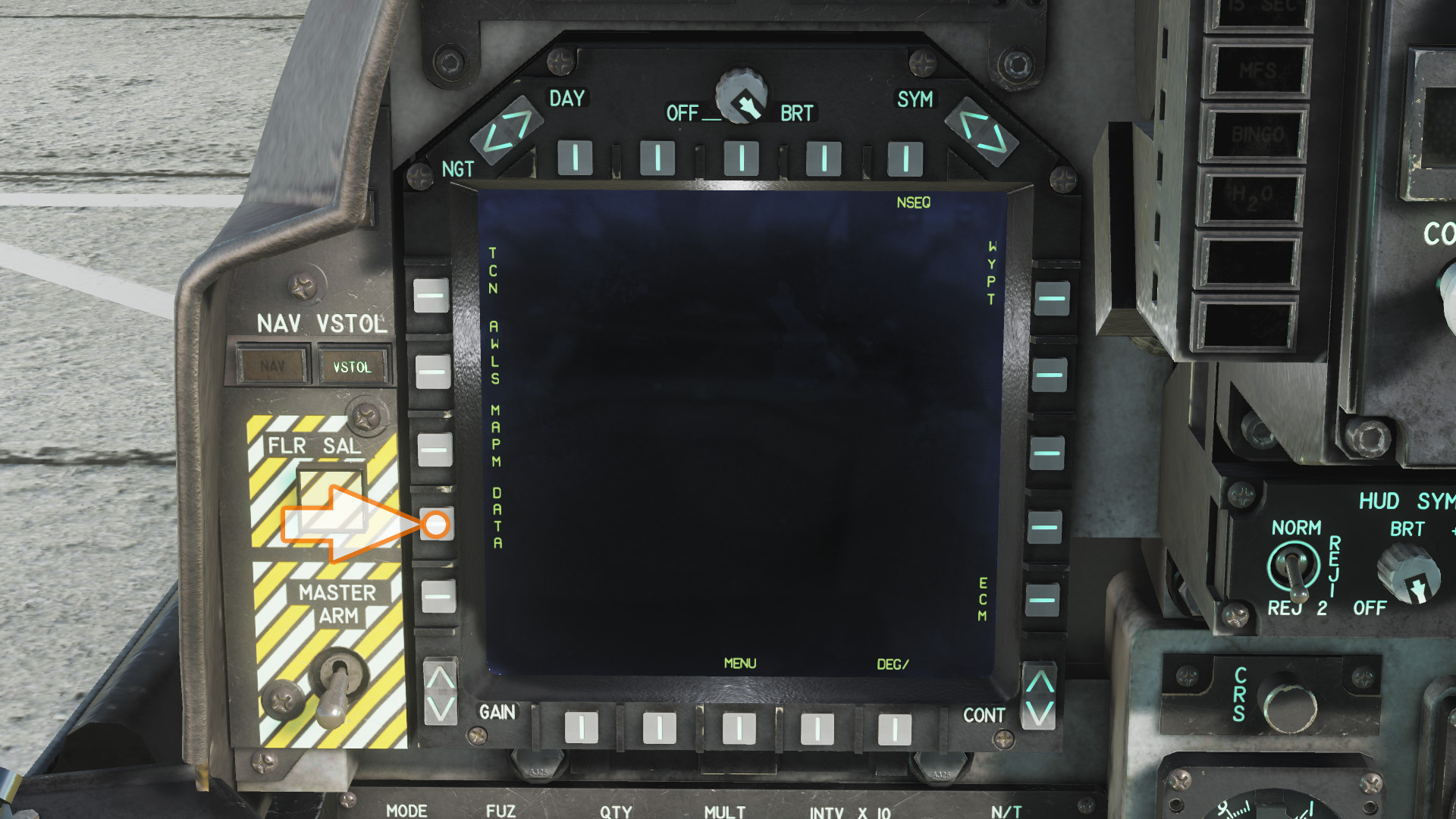
#.31
타게팅 포드를 장착했다면 FLIR 스위치를 위로 올려 ON 해줍니다.
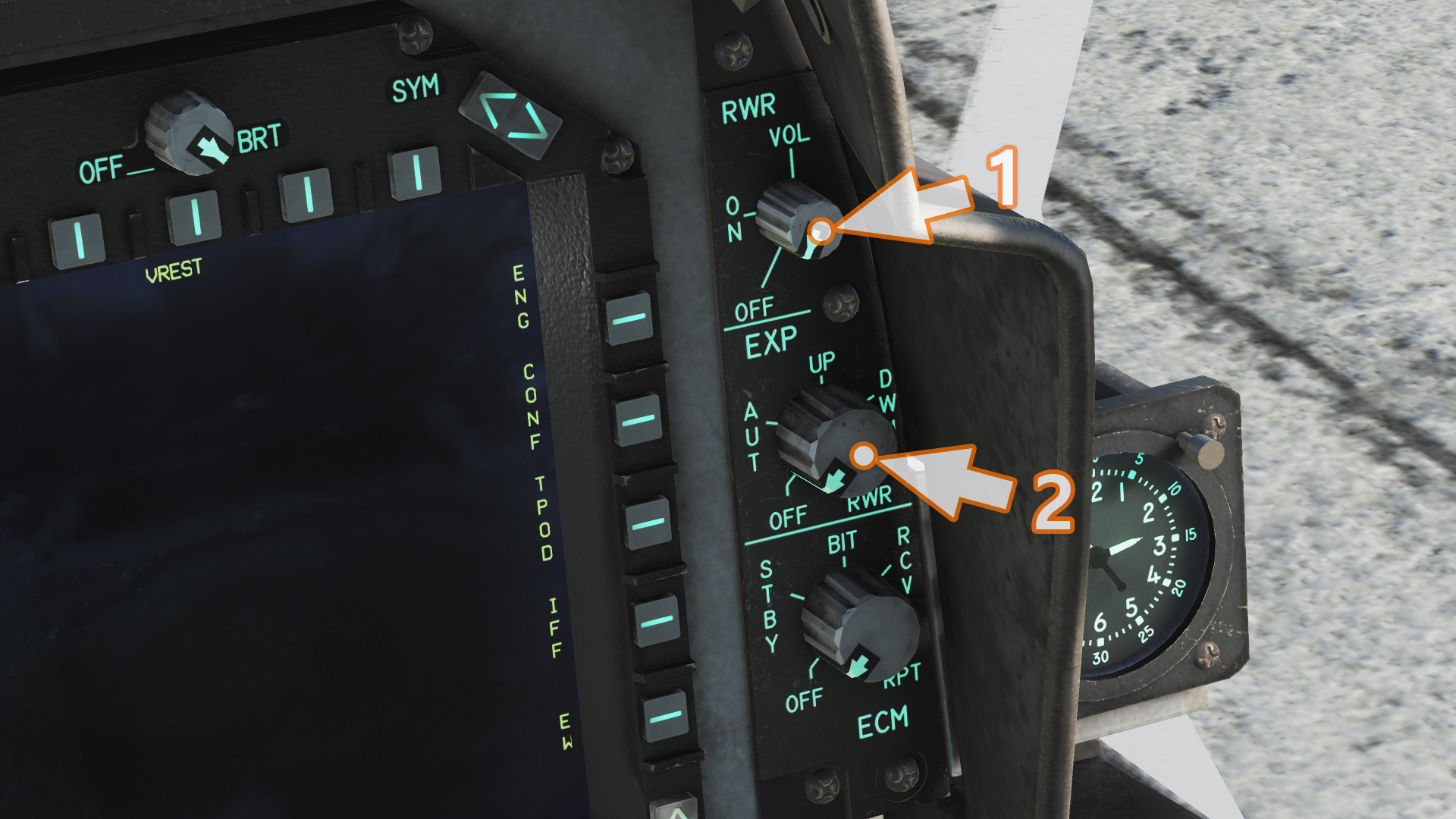
#.32
RWR (1) : 시계방향으로
EXP (채프, 플레어 관련 / 2) : AUT
EXP 아래의 ECM은 아래서 설명합니다.

#.33
V/UHF 라디오 다이얼 (1) : TR+G
Ground(아래)/AUX(위) 볼륨 노브 (2) : 시계방향으로
AUX 볼륨 노브를 돌려야 항공기 경고음이나 AIM-9 시커 사운드를 들을 수 있습니다.

#.34
INS 정렬을 시작한지 약 3분이 지나면 INS 정렬이 완료됩니다.
QUAL에 OK가 떴는지 확인한 후...

#.35
INS 노브를 NAV로 돌려줍니다.

#.36
그리고 DATA를 눌러 DATA 글씨의 체크를 해제해줍니다.

#.37
단축키 LCtrl + C를 눌러 캐노피를 닫습니다.

#.38
캐노피 잠금 레버가 Lock 위치에 있는지 확인합니다.

#.39
Seat ARM 레버를 아래로 내려 ARM 해줍니다.

#.40
Announciator Panel에 어떤 경고등이 켜져있는지 확인하고 적절한 조치를 취해줍니다.
현재 SKID에 불이 들어와있는데, 이는 Anti Skid 스위치가 지상에서 항공기의 조향을 위해 NWS에 맞춰져있기 때문에 켜져있는 것으로
이륙 직전에 해당 스위치를 NWS에서 Anti Skid로 설정하면 해결됩니다.

#.41
이어서 UFC 양쪽에 자리한 Warning/Caution Advisory Lights 패널도 확인해줍니다.
정상적인 상황이라면 어떠한 불도 켜져있지 않아야 합니다.

#.42
앞서 설명을 미뤘던 ECM 부분입니다.
ECM은 AN/ALQ-164 RF Jammer Pod (DECM)가 장착되어있을 경우 사용합니다.

#.43
만약, AN/ALQ-164 RF Jammer Pod를 장착하지 않은 상태에서 ECM 노브를 STBY, BIT, RCV, RPT로 돌리는 경우
Announciator Panel에 CW NOGO, P NOGO 경고등이 들어옵니다.
한번 경고등이 들어오면 ECM 노브를 OFF로 돌려도 계속 켜져있기 때문에
만약, AN/ALQ-164 RF Jammer Pod를 장착하지 않은 상태에서 ECM 노브를 돌려 해당 경고등이 켜진 경우
노브를 다시 OFF로 놓고 해당 경고등은 무시하면 됩니다.

#.44
만약, AN/ALQ-164 RF Jammer Pod를 장착한 상태에서 ECM 노브를 STBY, BIT, RCV, RPT로 돌리는 경우
Announciator Panel에 P JAM, CW JAM 경고등이 들어옵니다.
이는 오작동에 의한 경고라기 보다는 장치가 작동 중이라는 표시라고 보시면 됩니다.
덧붙여 ECM 노브를 RCV로 돌리면 P JAM이, RPT로 돌리면 P JAM과 CW JAM 램프에 불이 들어옵니다.
RCV : 평소에는 대기 중이며 포드에 레이더 신호가 감지되면 방해 전파 방출
RPT : 방해 전파를 계속해서 방출

#.45
UFC 왼쪽 상단의 Warning/Caution Advisory Lights 중 Master Causion 램프가 깜빡거리면 한번 클릭해 리셋 (OFF)

#.46
만약 메인기어에 초크 (차륜지)가 받쳐진 경우
\ (ATC) -> F8 (Ground Crew) -> F4 (Wheel chocks) -> F2 (Remove) 를 순서대로 눌러
초크를 치워줍니다.

#.47
Taxi/Landing Light : ON (위로 올려줍니다)

#.48
이것으로 출발을 위한 준비가 끝났습니다.
스로틀 레버 왼쪽에 숨겨진(?) 파킹브레이크 레버를 풀면 스로틀 조작이 가능해지는 만큼 자력으로 이동할 수 있습니다.
(마우스 커서를 가져다 대면 커서 모양이 바뀌고 툴팁에 Parking Brake라고 뜹니다)
※ DCS 2.5.5 버전의 경우 Cold and Dark로 시작해도 차륜지가 받쳐져있지 않습니다.
※ DCS 2.5.6 버전의 경우 엔진 시동 전에 차륜지를 제거해야 합니다. (시동 후 제거 불가)
※ DCS 2.7 버전의 경우 엔진 시동 후에도 차륜지를 제거할 수 있습니다.
'게임즐기기 > FLT Tutorial' 카테고리의 다른 글
| [DCS] 초심자를 위한 Mi-24P Hind Cold and Dark Startup (0) | 2021.06.17 |
|---|---|
| [DCS] 초심자를 위한 AV-8B Night Attack V/STOL Waypoint 설정 방법 (0) | 2021.03.07 |
| [DCS] 초심자를 위한 Ka-50 Blackshark 2 Waypoint 설정 방법 (0) | 2021.01.29 |
| [DCS] 초심자를 위한 NS430 Navigation System 사용 방법 (0) | 2021.01.18 |
| [DCS] 초심자를 위한 UH-1H Huey Cold and Dark Startup (0) | 2021.01.18 |